Instruction Selection:指令选择¶
约 814 个字 6 张图片 预计阅读时间 3 分钟
这一阶段的目的很简单,就是要选择合适的机器指令来 cover 掉 IR。有两种实现:
- Tree-oriented IR:输入是树形
- Linear IR:输入是字符串
1. 选择方式¶
这里使用 Jouette 指令集架构,如图:
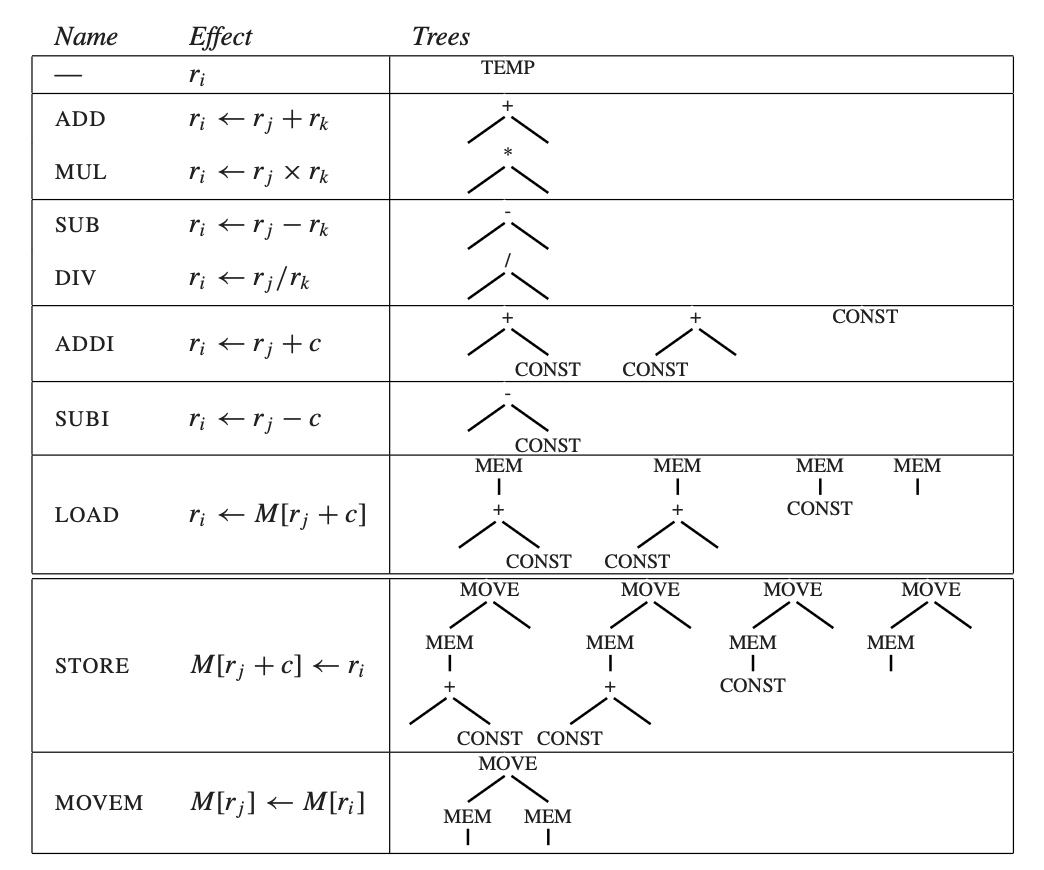
需要注意:
- 寄存器 r0 总是零
- 有些指令对应不止一个树形
覆盖的基本思想是把 IR 树瓦片化(tiling),也就是将 IR 树分解为多个子树,每个子树对应一个机器指令。
例子
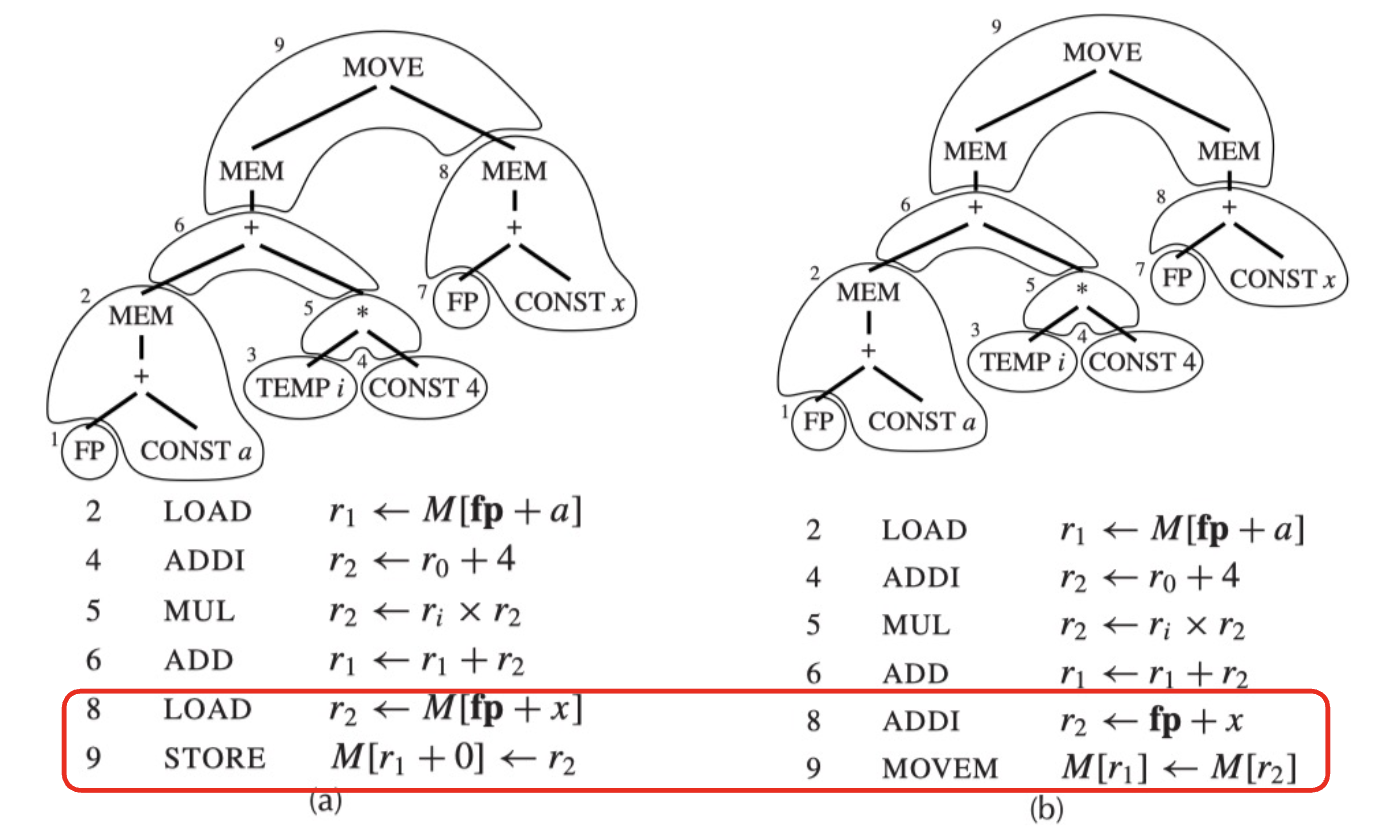
需要注意的是,一个 IR Tree 可以有多种 tiling 方式。
- Best Tiling:最少的 cost
- 对于固定 latency 的机器来说,就是最少的指令数
- Optimum Tiling:总 tilings 数量最少
- 全局最优
- Optimal Tiling:没有任意两个 tiling 能够合并成一个 cost 更小的 tiling
- 局部最优
- 每个 optimum tiling 都是 optimal 的,但不是每个 optimal tiling 都是 optimum 的。
2. 选择算法 1:Maximal Munch¶
假设瓦片越大越好,那么 maximal munch 就是一个贪心算法
- 从 IR 树根开始往下 top-down
- 选择能 cover 当前树形的最大瓦片
- 这里的“最大”定义为节点数最多的瓦片
- 如果有两个瓦片大小相同,则选择是不确定的/任意的
- 对子节点重复上述操作
- 指令生成按照原来的逆序
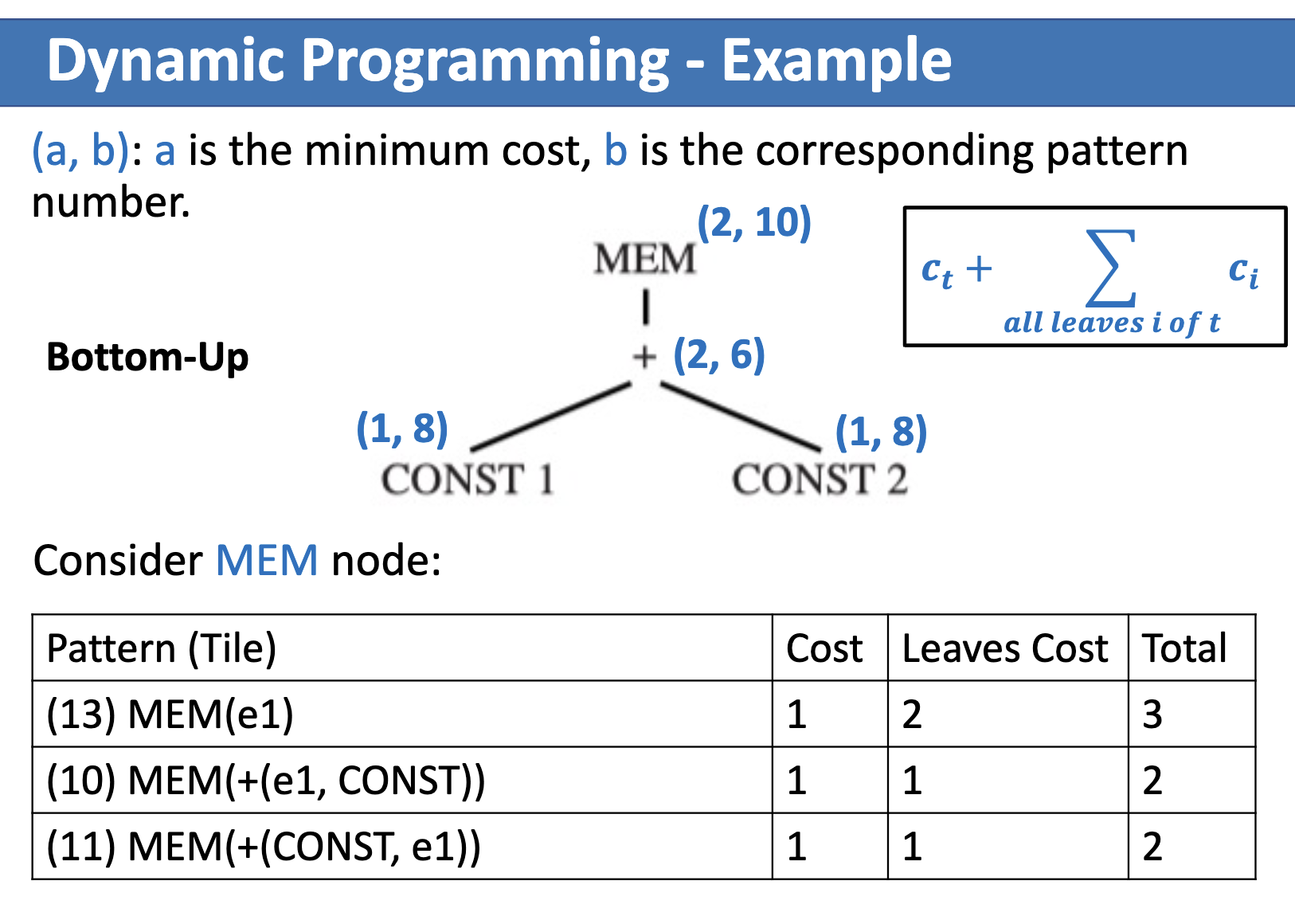
3. 选择算法 2:Dynamic Programming¶
前面提到的 Maximum Munch 算法是贪心的,可能会导致 suboptimal 的结果,也就是说这种方法总是找到 optimal 的 tiling,但不一定是 optimum 的。
动态规划算法通过子问题最优能够得到 optimum 的 tiling。
- 工作方式是 bottom-up
- 为树的每一个节点赋一个 cost 值
- 节点 x 的 cost(记作 f(x))是能够 cover 以 x 为根节点的子树的 best tiling 的 cost
- \(f(x) = \min_{\forall \ \text{tile}\ t \ \text{covering}\ x} (c_t + \sum_{\forall\ \text{leaf}\ i\ \text{of}\ t}f(i))\)
- 其中 \(c_t\) 是瓦片 t 的 cost
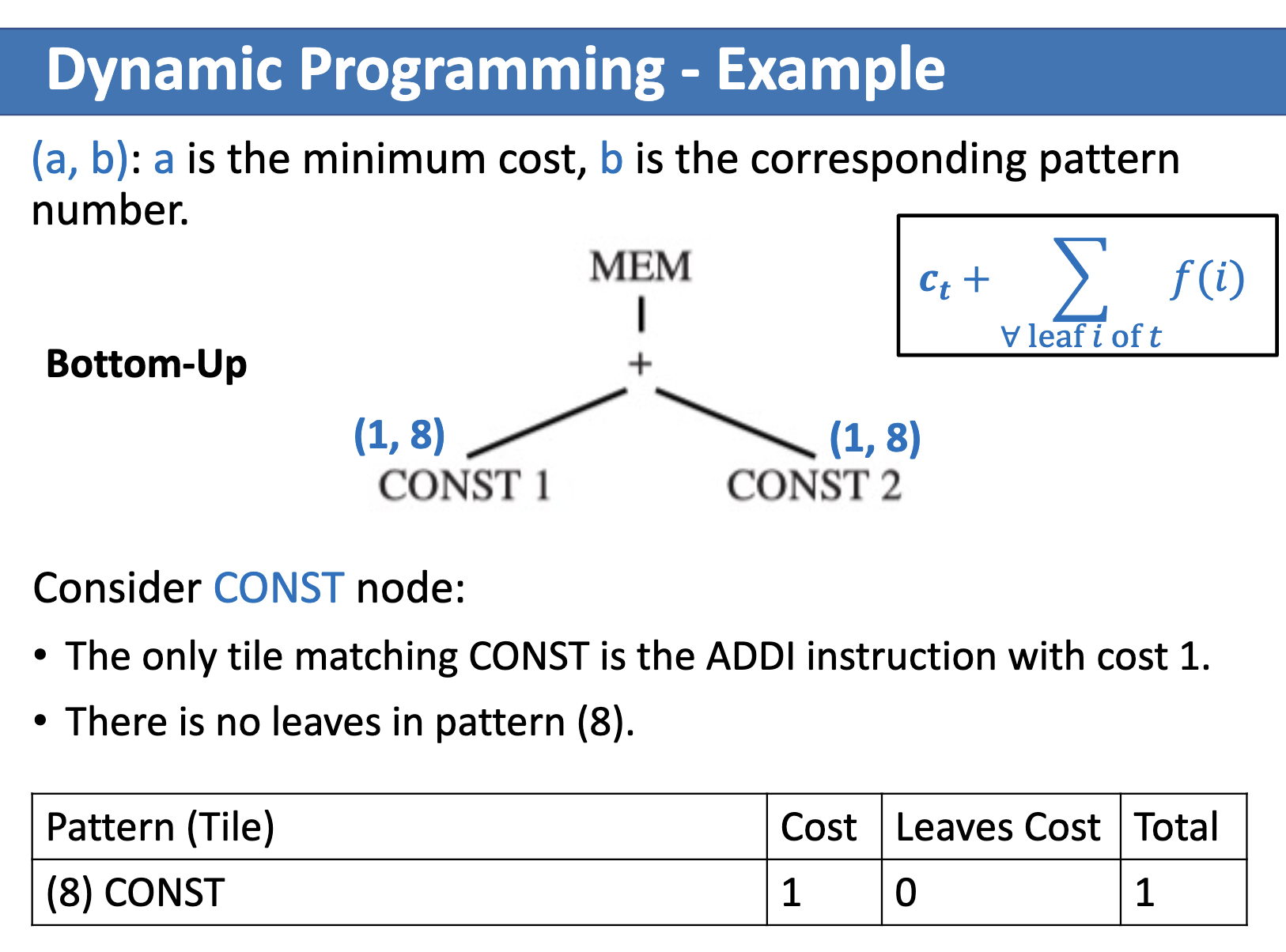
实现细节:
- 给出根节点 n,首先寻找好 n 的所有后继节点的 cost(递归地计算)
- 接着,每个树形(瓦片)会匹配到一个 cost
- 每个瓦片有零或多个 leaves,上面可以挂载子树
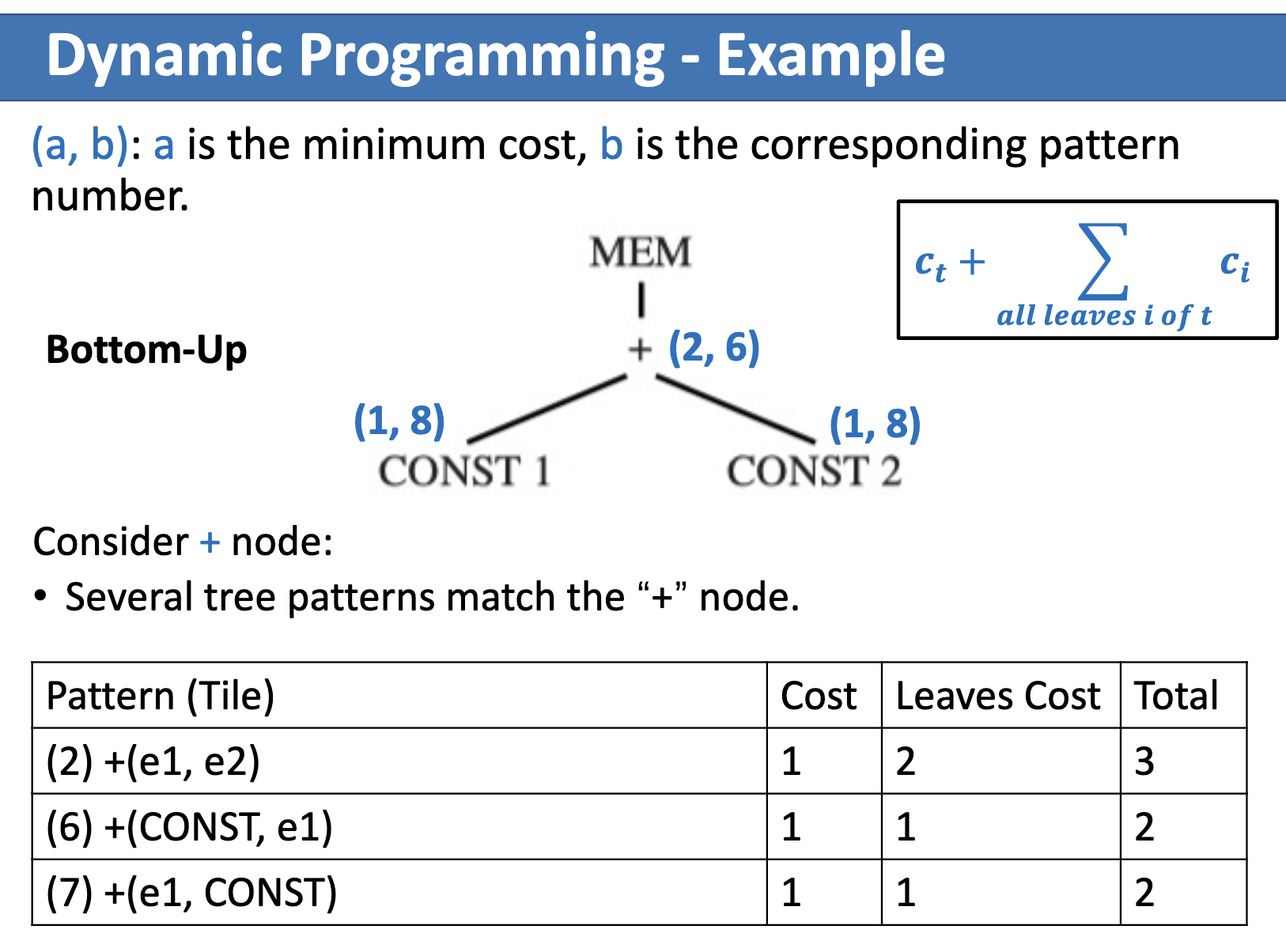
- 对于每个瓦片 t,其被匹配后的 cost 是 \(c_t + \sum_{\forall\ \text{leaf}\ i\ \text{of}\ t}f(i)\)
- 选择 cost 最小的树形
例子
一旦根节点的 cost 被找到,就开始了 instruction emission 的过程:
- 对节点 n 的每个 leaf li,Emission(li) 会被调用
- 然后再 emit 节点 n 匹配到的指令
两种算法的效率比较
假设:
- K:平均每个瓦片有 K 个 non-leaf 节点
- N:输入 IR 树的节点数量
- K':给定一个子树,最多需要检查多少个 node 能够找到对应的瓦片
- T':每个 node 平均有多少个可以匹配的瓦片
则:
- Maximal Munch 的时间正比于 \((K' + T')N/K\)
- Dynamic Programming 的时间正比于 \((K' + T')N\)
- 其中 K, K' 和 T' 都是常数,因此二者都是线性的时间
选择算法 3
Tree Grammar。这里先不展开。
4. CISC 指令集¶
先上一张对比图:
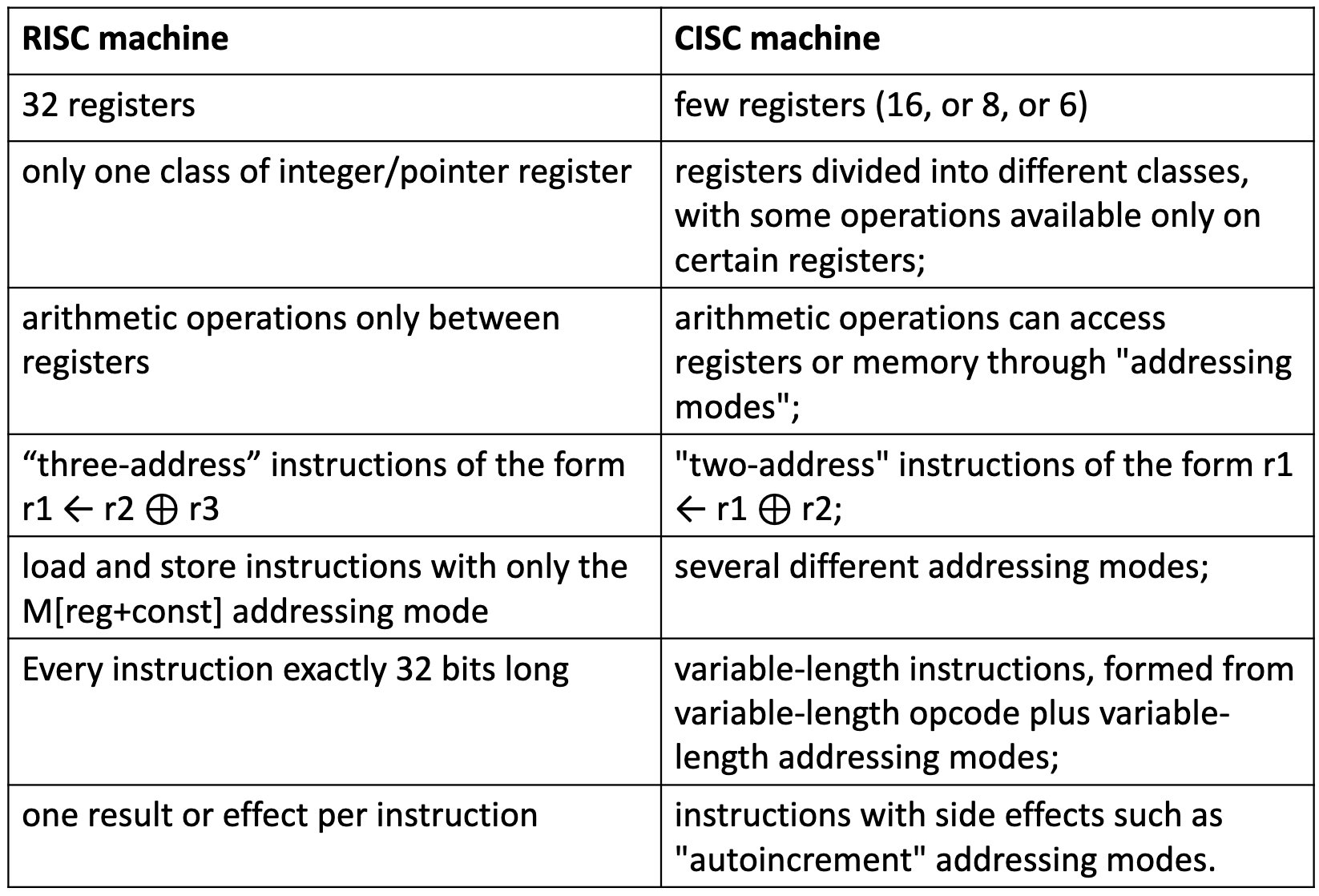
CISC 指令集相对于 RISC 来说有一些特殊限制,需要单独处理。这里也不多说了。